!————————————————
! title = ising2d.f90
! developer = Amesyabody
! released = 2015 2/13
! programming language = fortran
!
!explanation
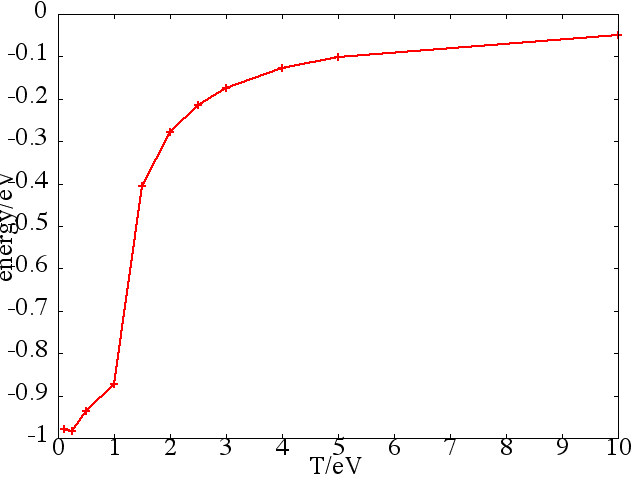
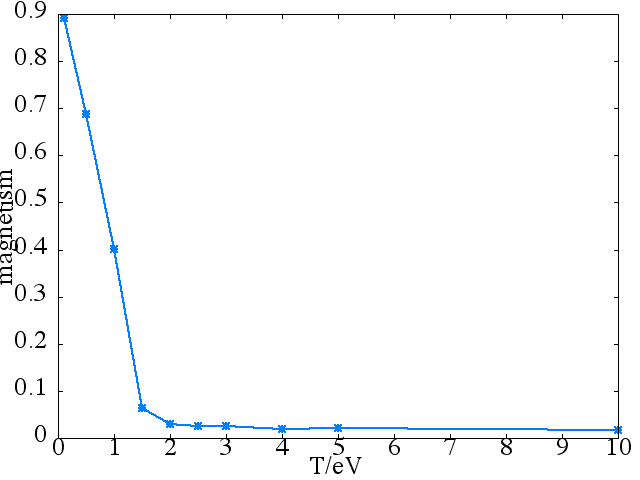
!2 dimentional square lattice Ising model's dynamical magnetism
!calculated by Monte Carlo method.
!————————————————
program main
implicit none
integer(4)::i,j,i_max,j_max,mcs,mcs_max,mov,mov_max,mcs2step
parameter(i_max=50,j_max=50,mcs_max=1000000,&
mcs2step=500000,mov_max=100)
real(8)::intj,temp
parameter(intj=0.25d0,temp=0.1d0)
real(8)::spin(0:i_max,0:j_max)
real(8)::ratio,ham1,ham2,hamres,dum,ene
integer(4)::px,mx,py,my,rndx,rndy
character(10)::movc,movc2
real(8)::mag,mag2,magres
!-----make random-----
integer(4),allocatable::seed(:)
integer cnt,seedsize
real(8)::rnd,rndi,rndj,rnds
call random_seed(size=seedsize)
allocate(seed(seedsize))
write(*,*)seedsize
dum=rndmf(0)
call system_clock(count=cnt)
seed=cnt!+idnint(dum*1000000)
! dum=rndmf(seed(0))
! seed=idnint(seed*dum)
call random_seed(put=seed)
!------------------
mag2=0.0d0
ene=0.0d0
do mov=0,mov_max
write(movc,'(i3)')mov
open(100+mov,file="ising_an/spin"//trim(adjustl(movc))//".dat"&
,status="unknown")
end do
open(5000,file="ising_an/anime.gnuplot",status="unknown")
open(5001,file="ising_an/animegif.gnuplot",status="unknown")
!-----primitive spin set-----
do i=0,i_max
do j=0,j_max
call random_number(rnd)
! write(*,*)rnd
if(rnd>0.5d0)then
spin(i,j)=1.0d0
else
spin(i,j)=-1.0d0
end if
! write(*,*)spin(i,j)!,cnt,seed(1)
write(100,'(i3,i3,f5.1)')i,j,spin(i,j)
end do
write(100,*)" "
end do
!----------------------------
do mcs=1,mcs_max
do i=0,i_max
do j=0,j_max
px=i+1
if(i==i_max)px=px-i_max-1
py=j+1
if(j==j_max)py=py-j_max-1
mx=i-1
if(i==0)mx=mx+i_max+1
my=j-1
if(j==0)my=my+j_max+1
ham1=ham1-intj*spin(i,j)*spin(px,j)&
-intj*spin(i,j)*spin(i,py)&
-intj*spin(mx,j)*spin(i,j)&
-intj*spin(i,my)*spin(i,j)
do mov=1,mov_max-1
if(mcs==mov*mcs_max/mov_max)&
write(100+mov,'(i3,i3,f5.1)')i,j,spin(i,j)
end do
if(mcs>mcs2step)then
mag2=mag2+spin(i,j)
end if
end do
do mov=1,mov_max-1
if(mcs==mov*mcs_max/mov_max)write(100+mov,*)" "
end do
end do
if(mcs>mcs2step)then
magres=magres+abs(mag2)
mag2=0.0d0
ene=ene+ham1
end if
call random_number(rndi)
call random_number(rndj)
rndx=idnint(rndi*i_max)
rndy=idnint(rndj*j_max)
! write(*,*)rnd
!write(*,*)spin(rndx,rndy)
spin(rndx,rndy)=-spin(rndx,rndy)
!write(*,*)spin(rndx,rndy)
do i=0,i_max
do j=0,j_max
px=i+1
if(i==i_max)px=px-i_max-1
py=j+1
if(j==j_max)py=py-j_max-1
mx=i-1
if(i==0)mx=mx+i_max+1
my=j-1
if(j==0)my=my+j_max+1
ham2=ham2-intj*spin(i,j)*spin(px,j)&
-intj*spin(i,j)*spin(i,py)&
-intj*spin(mx,j)*spin(i,j)&
-intj*spin(i,my)*spin(i,j)
end do
end do
ratio=exp((-ham2+ham1)/temp)
! write(*,*)ham1,ham2,ratio
ham1=0.0d0
ham2=0.0d0
call random_number(rnds)
if(ham1 > ham2)then!metroporis
goto 200
end if
if(rnds>ratio)then
spin(rndx,rndy)=-spin(rndx,rndy)
end if
200 continue
end do
do i=0,i_max
do j=0,j_max
mag=mag+spin(i,j)
px=i+1
if(i==i_max)px=px-i_max-1
py=j+1
if(j==j_max)py=py-j_max-1
mx=i-1
if(i==0)mx=mx+i_max+1
my=j-1
if(j==0)my=my+j_max+1
hamres=hamres-intj*spin(i,j)*spin(px,j)&
-intj*spin(i,j)*spin(i,py)&
-intj*spin(mx,j)*spin(i,j)&
-intj*spin(i,my)*spin(i,j)
write(100+mov_max,'(i3,i3,f5.1)')i,j,spin(i,j)
end do
write(100+mov_max,*)" "
end do
mag=mag/(dble(i_max*j_max))
! write(*,'(3f10.5,f15.5)')temp,intj,mag,hamres
ene=ene/(dble((mcs_max-mcs2step)*(i_max+1)*(j_max+1)))
magres=magres/(dble((mcs_max-mcs2step)*(i_max+1)*(j_max+1)))
write(*,'(A,f10.5,A,f10.5)')"energy=",ene," magnet=",magres
write(5000,*)"set size sq"
write(5000,*)"set pm3d map"
write(5000,*)"set palette rgbformulae 21,22,23"
write(5000,*)"set xlabel 'x'"
write(5000,*)"set ylabel 'y'"
write(5000,*)"set zra[-1:1]"
write(5000,*)"set zlabel 'spin'"
write(5000,*)"splot 'spin0.dat'"
write(5000,*)"pause 0.1"
do mov=1,mov_max
write(movc,'(i3)')mov
write(5000,*)"splot 'spin"//trim(adjustl(movc))//".dat'"
write(5000,*)"pause 0.1"
end do
write(5001,*)"set tics font 'Times,15'"
write(5001,*)"set xlabel font 'Times,15'"
write(5001,*)"set ylabel font 'Times,15'"
write(5001,*)"set size sq"
write(5001,*)"set pm3d map"
write(5001,*)"set palette rgbformulae 21,22,23"
write(5001,*)"set xlabel 'x'"
write(5001,*)"set ylabel 'y'"
write(5001,*)"set zra[-1:1]"
write(5001,*)"set cbrange [-1:1]"
write(5001,*)"set zlabel 'spin'"
write(5001,*)"set term gif animate optimize"
write(5001,*)"set output 'is_t10.gif'"
write(5001,*)"do for[i=0:100] {"
write(5001,*)'file = sprintf("spin%01d.dat", i)'
write(movc2,'(i10)')mcs_max/mov_max
write(5001,*)'time = sprintf("s=%d[mcs]",i*'//trim(adjustl(movc2))//')'
write(5001,*)"set title time"
write(5001,*)"splot file"
write(5001,*)"}"
contains
real(8) function rndmf(seeds)
implicit none
integer(4)::a,m,q,p,n,ndiv,j,k,seeds
real(8)::rm,rmax
parameter(a=16807,m=2147483647,rm=1.0/m)
parameter(q=127773,p=2836,n=32,ndiv=1+(m-1)/n)
parameter(rmax=1.0-1.2e-7)
integer(4)r(n),r0,r1
if (seeds .ne. 0)then
r1=abs(seeds)
do j=n+8,1,-1
k=r1/q
r1=a*(r1-k*q)-p*k
if(r1 .lt. 0)r1=r1+m
if(j .le. n)r(j)=r1
end do
r0=r(1)
end if
k=r1/q
r1=a*(r1-k*q) -p*k
if(r1 .lt. 0)r1=r1+m
j=1+r0/ndiv
r0=r(j)
r(j)=r1
rndmf=min(rm*r0,rmax)
end function
end program